Featured system
DragonBall
A visually guided spherical robot for hazardous environments where contamination resistance and simple decontamination are critical.
Summary
DragonBall explores spherical robot design for hazardous environments where contamination resistance and simple decontamination are important. The work addresses locomotive control, sensor placement, and robust construction in a rolling-body architecture.
Challenge
Hazardous environments demand architectures that protect internal systems while preserving sensing and controllability. Spherical robots offer strong protective characteristics, but packaging and control become more complex.
Approach
The project uses a sealed spherical form as the primary architectural choice, exploring how sensing, visual guidance, and motion control interact when the robot body itself is the protective shell.
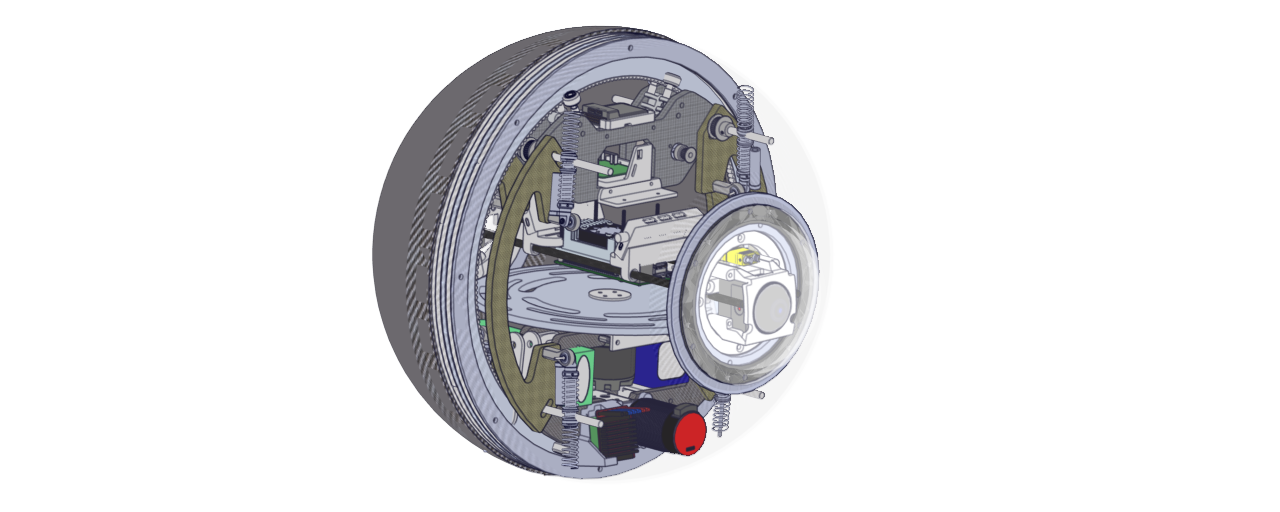
System breakdown
Gallery
Concept views, hardware, and motion studies.


Lessons learned
Protected architectures shift complexity rather than removing it. DragonBall highlights how the mechanical shell, sensor placement, and control logic must be designed as one tightly constrained package.
Outcome
This project produced both a compelling hazardous-environment robot concept and a publication-backed design conversation around spherical robotic systems.
Related publication
The DragonBall work contributed to published results in RoManSy 2020 and is best traced through the research profile and project media together.