
Featured system
Varuna
A ROS-based autonomous surface vessel designed for environmental monitoring, sub-surface measurements, and dependable operation in shallow waterways.
Summary
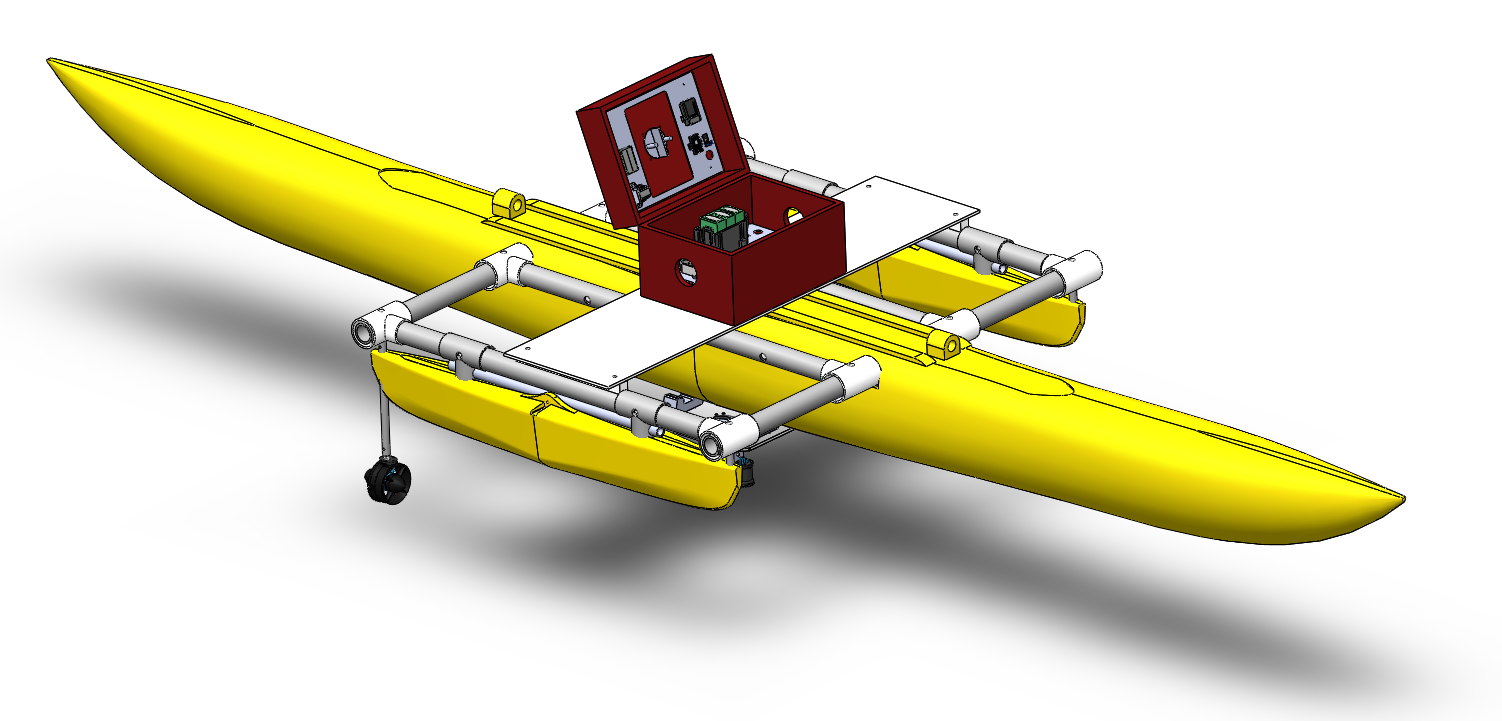
VARUNA Eddy II is built around a single hull with two outrigger pontoons for support. Electrically powered and autonomy-ready, it was developed to carry instrumentation and operate persistently enough to support monitoring tasks such as tracking invasive aquatic plant growth.
Challenge
An environmental monitoring vessel has to balance stability, modest power budgets, instrument integration, and repeatable autonomous behavior while still being easy to launch, recover, and maintain in the field.
Approach
The platform uses an electrically powered surface vessel architecture with supportive outriggers and ROS-based autonomy. The overall system couples hull form, propulsion, autonomy, and payload handling around a field-use mission rather than a pure demonstration goal.
System breakdown
Gallery
Field views and deployment imagery.

Lessons learned
Marine robotics quickly punishes fragile access patterns and unstable instrumentation layouts. Varuna reinforces the value of stable hull geometry, accessible payload bays, and system decisions that respect launch and recovery as core parts of the mission.
Outcome
Varuna stands as a practical autonomous monitoring platform that ties sensing, autonomy, and field usability into one marine robotics system rather than treating them as separate engineering tracks.
Related reference
For broader research context around this work and related projects, the Google Scholar archive remains the best external reference point.